关于寒武纪生命大爆发——发生在寒武纪时期的生命大量快速演化,有一个有趣假设,即“光开关理论(LightSwitchTheory)”。该理论认为正是眼睛的进化,引发了生命体之间的进化竞赛,使得那些具备最佳视觉的生物才最有可能生存下来。也许“光开关理论”理论对于机器人也是适用的。技术的发展实际上也是非常迅速的。
深度学习软件通过观察世界来“学习”,这一点赋予了它另一巨大优势——不依赖规则(notrule-bound)。人类的婴儿学会依照物体的突出可识别性特征来识别物体,同理,深度学习软件在对物体分类时也是依据物体的视觉特征。
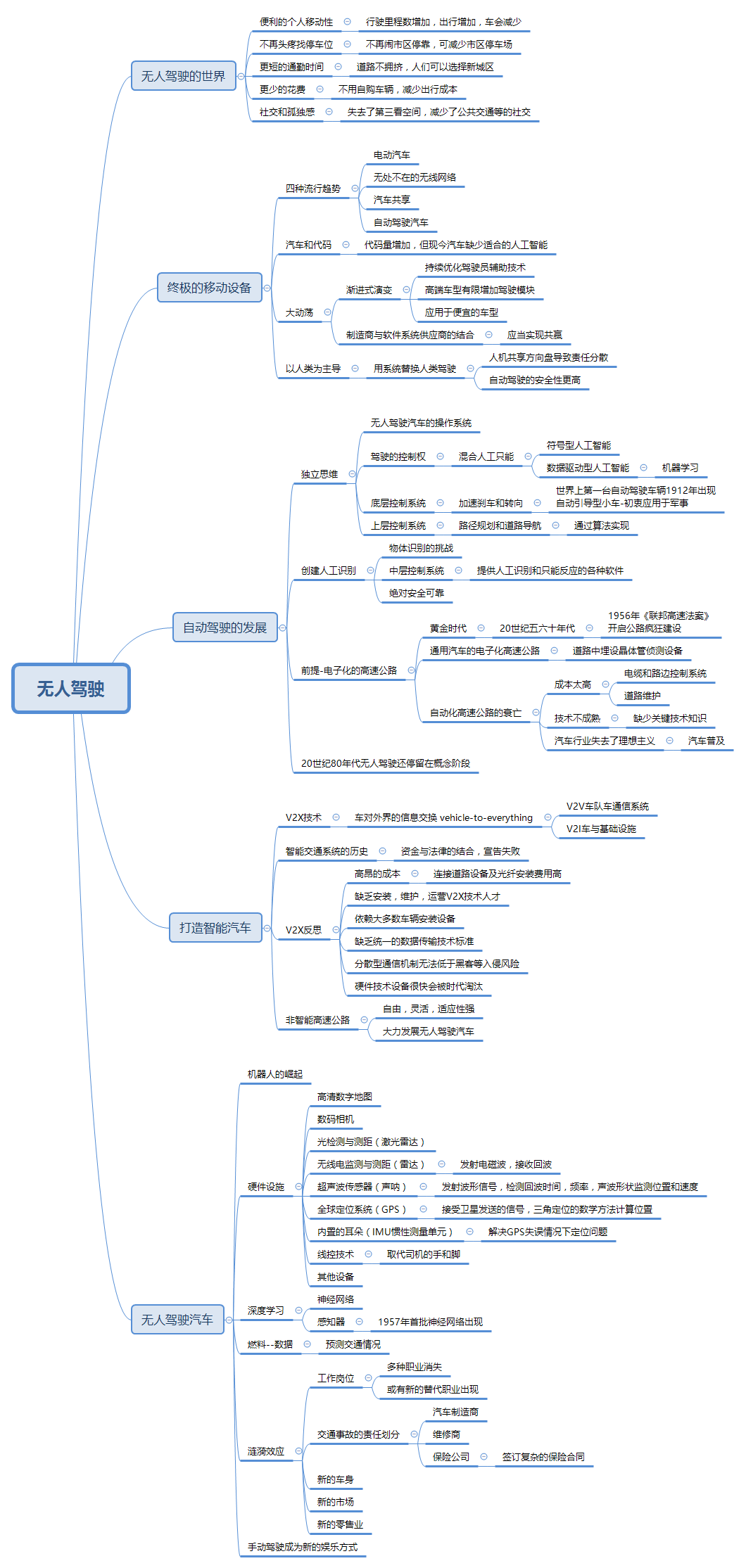
无人驾驶的世界
这种新技术应用所带来的期望效益不增反减,是源于效率提升反而促进了使用率,经济学家将这种现象称为“回弹效应(ReboundEffect)”。
如果无人驾驶汽车能像实施军事打击一样准时定点地将乘客投放到他们的目的地,那么这种诱人的高效出行就会产生隐性成本——失去人们因徒步出行而给城市街道带来的活力和收益。
只要无人驾驶汽车的安全驾驶记录超出人类驾驶员的平均水平,它们就能造福人类。
无人驾驶减少了人们利用公共交通工具等的社交活动,使人们产生孤独感。
交朋友的三个关键因素是:相近的地理位置,反复出现的无目的性社交互动,以及可以让人们放下内心防御的氛围。
其实人们感到孤独的一个原因在于他们没有“第三空间”来相处,那样的地方既不能是工作场所也不能是家里,而应该是他们可以闲来无事去转转的地方。
无人驾驶发展史: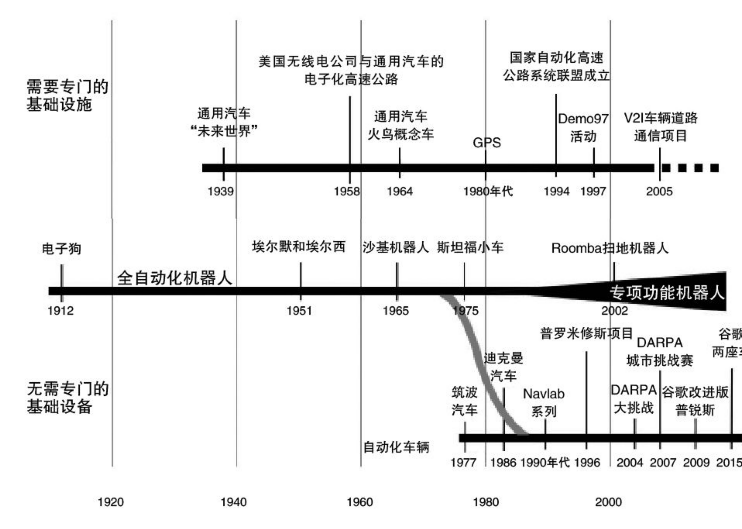
终极的移动设备
目前,有四种流行趋势,迫使汽车企业不得不重新思考它们的商业模式,这些趋势是电动汽车、无处不在的无线网络、汽车共享以及自动驾驶汽车。
关于人机是否应该共享方向盘的讨论:
优秀管理的核心原则之一,就是不要将一个关键性任务分给两个人去做,这是一种被称为“责任分散(SplitResponsibility)”的典型管理失误。
人机共享会导致责任分散,而完全的自动驾驶实际上安全性则更高于人类驾驶。
为了简化问题,我们将人工智能技术中丰富多元的内容大致分为两派:自上而下的和自下而上的,或称为符号型人工智能(symbolicAI)和数据驱动型人工智能(data-drivenAI),后者就是渐渐被人熟知的“机器学习”。
机器人技术中一条基本的规则就是,环境越是简单、越是容易预测(极端事件越少),构建一个使机器人在这种环境下执行任务的软件就越简单。
把机器学习系统做到99%的准确率相对简单,但是在这个基础上再提升0.9999%的准确率却非常难,而这0.9999%才是根本性的需求。